TP7 : B-spline Surfaces
Code
B-spline curves revisited
Back in TP3, we were working with B-spline curves. A B-spline curved is defined by the following:
\[d : \text{ degree } \\ \mathbf d_{0},\dots, \mathbf d_{m} : \text{ control polygon } \\ t_{0},\dots,t_{m+d+1} : \text{ knot vector }\]Tensor product B-spline surfaces
A B-spline surface is defined via
\[du, dv : \text{ degrees in } u, v \\ \text{ } \\ \left( \begin{array}{ccc} \mathbf d_0^0 & \dots & \mathbf d_m^0 \\ \vdots & \ddots & \vdots \\ \mathbf d_0^n & \dots & \mathbf d_m^n \end{array} \right) : \text{ control net } \\ \text{ } \\ u_0,\dots,u_{m+du+1} : \text{ knot vector in } u \\ v_0,\dots,v_{n+dv+1} : \text{ knot vector in } v\]B-spline surface is defined for $(u,v) \in [u_{du},u_{m+1}[ \times [v_{dv},v_{n+1}[$ as
\[S(u,v) = \sum_{i=0}^m \sum_{j=0}^n \mathbf d_i^j N_{i}^{k}(u) N_{j}^{l}(v)\]where $N$ are the basis functions (see TP3).
Surface Patches
Recall that a B-spline curve is made from many smaller pieces, defined over parameter intervals $[t_i,t_{i+1}]$. Analogically, a B-spline surface consists of patches, each defined over a parameter rectangle $[u_i,u_{i+1}] \times [v_j,v_j+1]$ :
\[\begin{array}{llll} [u_{du},u_{du+1}] \times [v_{dv },v_{dv+1}] & [u_{du+1},u_{du+1}] \times [v_{dv },v_{dv+1}] & \dots & [u_{m},u_{m+1}] \times [v_{dv },v_{dv+1}] \\ [u_{du},u_{du+1}] \times [v_{dv+1},v_{dv+2}] & [u_{du+1},u_{du+1}] \times [v_{dv+1},v_{dv+2}] & \dots & [u_{m},u_{m+1}] \times [v_{dv+1},v_{dv+2}] \\ \vdots & \vdots & \ddots & \vdots \\ [u_{du},u_{du+1}] \times [v_{n-1},v_{n }] & [u_{du+1},u_{du+1}] \times [v_{n-1},v_{n }] & \dots & [u_{m},u_{m+1}] \times [v_{n-1},v_{n }] \\ [u_{du},u_{du+1}] \times [v_{n },v_{n+1}] & [u_{du+1},u_{du+1}] \times [v_{n },v_{n+1}] & \dots & [u_{m},u_{m+1}] \times [v_{n },v_{n+1}] \\ \end{array}\]Algorithm
We’ll evaluate and display each patch individually. The algorithm is summarized in the following pseudocode.
# loop over all patches
for i in (du,du+1,...,m) :
for j in (dv,dv+1,...,n) :
# check if the patch is not degenerate
if not valid_patch :
continue
# loop over the samples of the current patch
# defined over [u_i,u_i+1] x [v_j,v_j+1]
for u in uniform_sampling( u_i, u_i+1, number_of_samples ) :
for v in uniform_sampling( v_j, v_j+1, number_of_samples ) :
compute_S(i,j,u,v) # a surface point on the current patch
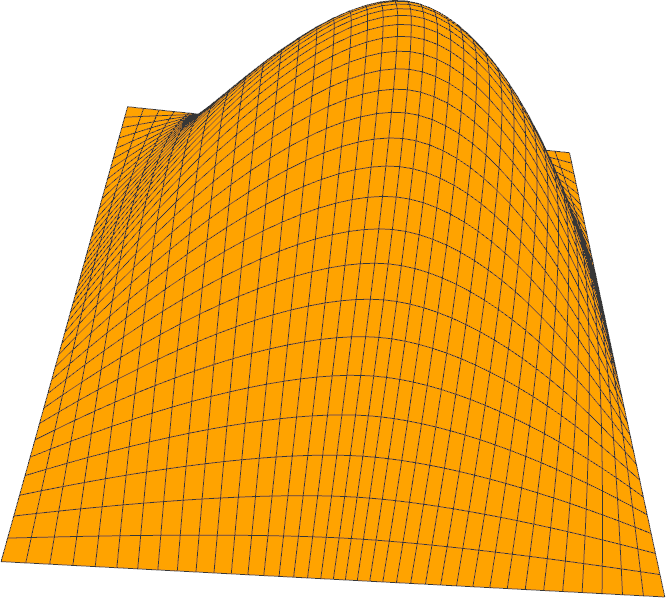
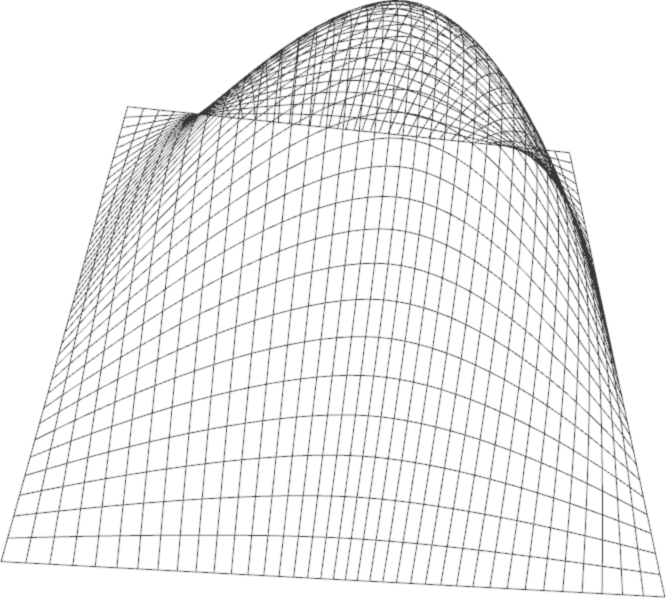
ToDo
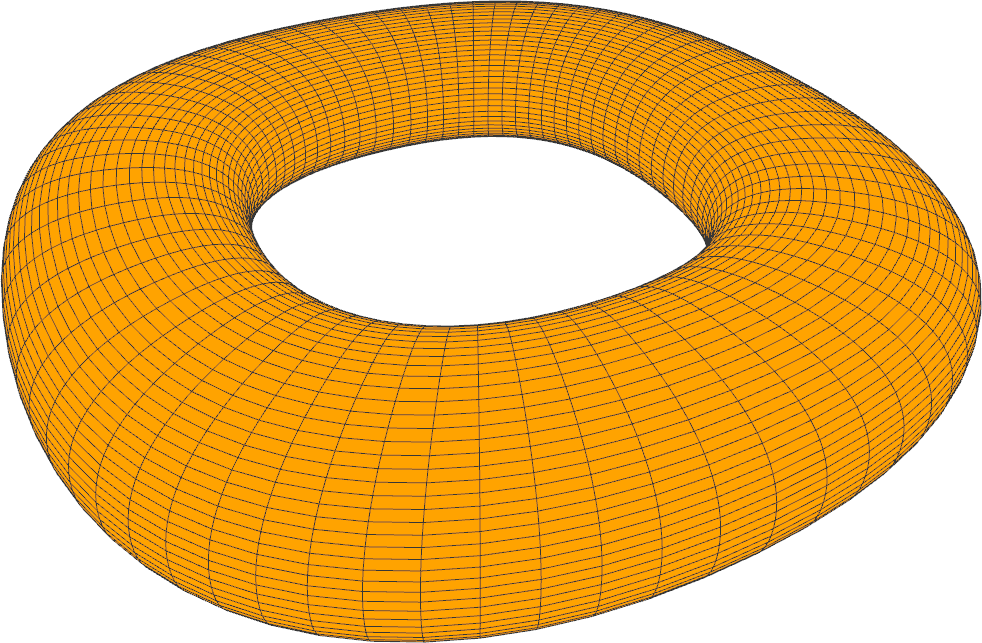
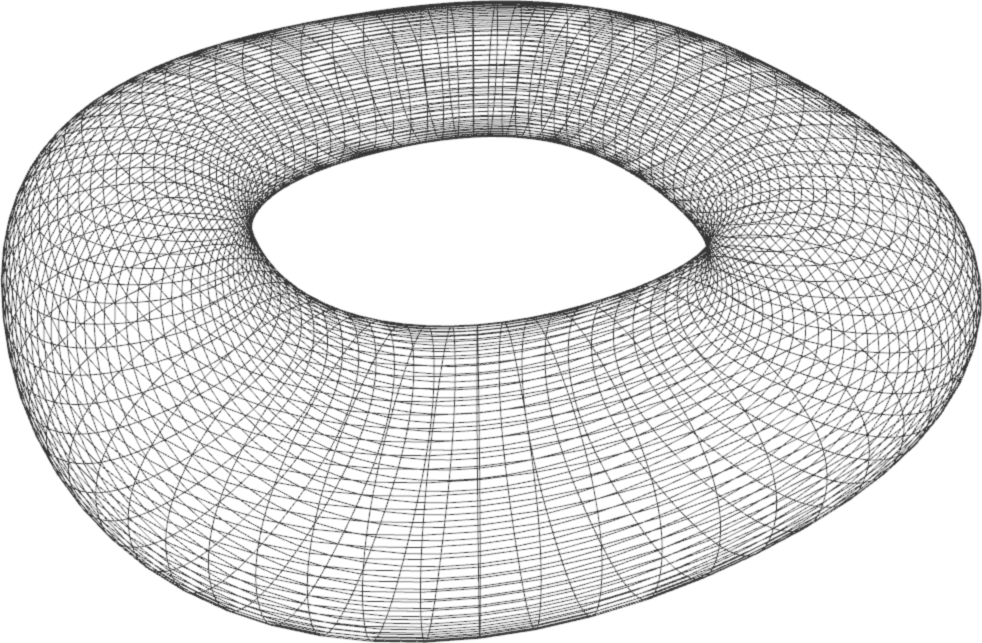
- Implement evaluation of B-spline surfaces. Test with the provided datasets (simple.bspline and torus.bspline).
- Modify the knot vectors for the
simpledataset. Experiment with various configurations. How does the surface change? - [Bonus] NURBS surfaces can be used to represent the unit sphere, the same way we used NURBS curves to represent the unit circle in TP3. Modify your implementation of B-spline surfaces to compute NURBS surfaces. Test with the hemisphere (hemi.nurbs) and the modified torus (torus.nurbs).
Note: full sphere control points, weights, and knots can be found in Representing a Circle or a Sphere with NURBS by David Eberly.
Resources
- B-spline surfaces : Construction
- 1.4.4 B-spline surface, online chapters from the book Shape Interrogation for Computer Aided Design and Manufacturing by N. Patrikalakis, T. Maekawa & W. Cho
- NURBS on wikipedia